Non-Linear Systems of ODEs
6.0 Concept
Consider the system of ODEs in 4.0,
$ \frac{dx_1}{dt}=f_1(t,x_1,x_2,...x_n) $
$ \frac{dx_2}{dt}=f_2(t,x_1,x_2,...x_n) $
...
$ \frac{dx_n}{dt}=f_n(t,x_1,x_2,...x_n) $
When the $ n $ ODEs are not all linear, this is a nonlinear system of ODE. Consider an example,
$ \frac{dx}{dt}=x(1-2x-3y) $,
$ \frac{dy}{dt}=2y(3-x-2y) $.
In this tutorial, we will analyse this system in different aspects to build up a basic completed concept.
6.1 Equilibrium Point
An equilibrium point is a constant solution to a differential equation. Hence, for an ODE system, an equilibrium point is going to be a solution of a pair of constants. Set all of the differential terms equal to $ 0 $ to find the equilibrium point.
In the example in 6.0, we set $ \frac{dx}{dt}=\frac{dy}{dt}=0 $, hence $ x(1-2x-3y)=2y(3-x-2y)=0 $. Solve this system of normal equations.
· When $ x=2y=0 $, then $ x=y=0 $.
· When $ x=3-2x-2y=0 $, then $ x=0 $, $ y=\frac{3}{2} $.
· When $ 1-2x-3y=2y=0 $, then $ x=\frac{1}{2} $, $ y=0 $.
· When $ 1-2x-3y=3-x-2y=0 $, then $ x=-7 $, $ y=5 $.
Hence, the equilibrium points of this nonlinear system are $ (x=0,y=0) $, $ (x=0,y=\frac{3}{2}) $, $ (x=\frac{1}{2},y=0) $, and $ (x=-7,y=5) $. This means in a xy-coordinate, macroscopically, the graph of the solution of ODE (a function) will keep a dynamic equilibrium, near which the sum of velocity (measured in both direction and speed) of each point on the graph is $ 0 $.
6.2 Linearisation
Macroscopically, the whole system is nonlinear, but we still need a linear system for further analysis. So here comes a method of linearisation near the equilibrium points. We linearise the graph of the solution for details to sketch a global phase portrait. A similar concept we can refer to is the expansion of Taylor series. It is not a linearisation, but using a method to approach the exact function, which is kinda like using local phase portraits to approach the global one. Linearisation here is a method to identify the local phase portraits.
Suppose $ (x_0,y_0) $ is an equilibrium point and define two deviation variables $ \epsilon (t)=x(t)-x_0 $, $ \mu (t)=y(t)-y_0 $, where $ x(t)→x_0 $ and $ y(t)→y_0 $. The "deviation variables" mean that we start slightly differently from $ (x_0,y_0) $ and measure the difference to be more accurate. Hence $ \epsilon(t) $ and $ \mu (t) $ are approaching to $ 0 $.
Then we differentiate the deviation variables to have
$ \frac{d\epsilon}{dt}=\frac{dx}{dt}=f(x_0+\epsilon,y_0+\mu) $,
$ \frac{d\mu}{dt}=\frac{dy}{dt}=g(x_0+\epsilon,y_0+\mu) $.
By the expansion of Taylor series for two-variable functions, we have
$ \frac{d\epsilon}{dt}=f(x_0,y_0)+\epsilon \frac{\partial f}{\partial x}|_{(x_0,y_0)}+\mu \frac{\partial f}{\partial y}|_{(x_0,y_0)}+... $,
$ \frac{d\mu}{dt}=g(x_0,y_0)+\epsilon \frac{\partial g}{\partial x}|_{(x_0,y_0)}+\mu \frac{\partial g}{\partial y}|_{(x_0,y_0)}+... $
Here we converted the nonlinear system to a linear one. As $ f(x_0,y_0)≈g(x_0,y_0)→0 $, so we can write the system into the matrix form, which is the linearisation near $ (x_0,y_0) $: $ \begin{bmatrix} \frac{d\epsilon}{dt} \\ \frac{d\mu}{dt} \end{bmatrix}=\begin{bmatrix} \frac{\partial f}{\partial x} & \frac{\partial f}{\partial y} \\ \frac{\partial g}{\partial x} & \frac{\partial g}{\partial y} \end{bmatrix} \begin{bmatrix} \epsilon \\ \mu \end{bmatrix} $.
This is called Jacobian matrix, usually denoted as $ J $.
Still considering the example in 6.0, we will have the general linearisation
$ J=Df(x,y)=\begin{bmatrix} \frac{\partial f}{\partial x} & \frac{\partial f}{\partial y} \\ \frac{\partial g}{\partial x} & \frac{\partial g}{\partial y} \end{bmatrix}=\begin{bmatrix} 1-4x-3y & -3x \\ -2y & 6-2x-8y \end{bmatrix} $ for this nonlinear system.
Hence, if plugging all the equilibrium points from 6.1 into this general linearisation, we will have:
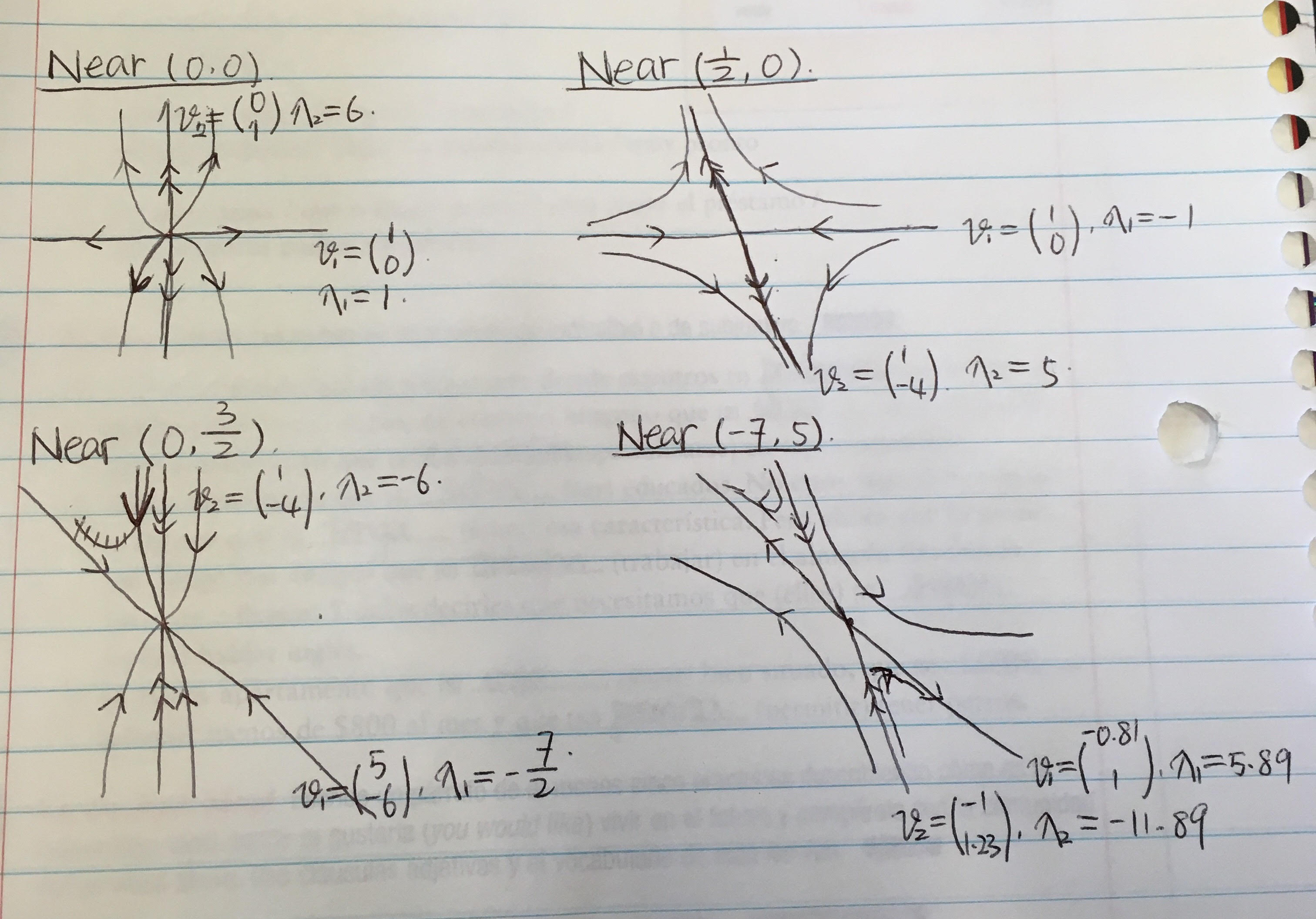
· $ J_{(0,0)}=\begin{bmatrix} 1 & 0 \\ 0 & 6 \end{bmatrix} $. The eigenvalues are $ \lambda_1=1 $, $ \lambda_2=6 $, and the corresponding eigenvectors are $ \bold{v_1}=\begin{bmatrix} 1 \\ 0 \end{bmatrix} $, $ \bold{v_2}=\begin{bmatrix} 0 \\ 1 \end{bmatrix} $.
· $ J_{(\frac{1}{2},0)}=\begin{bmatrix} -1 & -\frac{3}{2} \\ 0 & 5 \end{bmatrix} $. The eigenvalues are $ \lambda_1=-1 $, $ \lambda_2=5 $, and the corresponding eigenvectors are $ \bold{v_1}=\begin{bmatrix} 1 \\ 0 \end{bmatrix} $, $ \bold{v_2}=\begin{bmatrix} 1 \\ -4 \end{bmatrix} $.
· $ J_{(0,\frac{3}{2})}=\begin{bmatrix} -\frac{7}{2} & 0 \\ -3 & -6 \end{bmatrix} $. The eigenvalues are $ \lambda_1=-\frac{7}{2} $, $ \lambda_2=-6 $, and the corresponding eigenvectors are $ \bold{v_1}=\begin{bmatrix} 5 \\ -6 \end{bmatrix} $, $ \bold{v_2}=\begin{bmatrix} 0 \\ 1 \end{bmatrix} $.
· $ J_{(-7,5)}=\begin{bmatrix} 14 & 21 \\ -10 & -20 \end{bmatrix} $. The eigenvalues are $ \lambda_1=\sqrt{79}-3≈5.89 $, $ \lambda_2=-\sqrt{79}-3≈-11.89 $, and the corresponding eigenvectors are $ \bold{v_1}=\begin{bmatrix} -0.81 \\ 1 \end{bmatrix} $, $ \bold{v_2}=\begin{bmatrix} -1 \\ 1.23 \end{bmatrix} $.
6.3 Local Phase Portraits
For a nonlinear system of two ODEs, a local phase portrait consists two axes, the graph of solution and their directions. Basically,
· The axes follow the directions of eigenvectors of the linearisations.
· From the knowledge of equilibrium points and their stability, we know:
If the eigenvalue $ \lambda>0 $, then the equilibrium point is unstable, hence the solution is "pulling" the point out to both sides.
If the eigenvalue $ \lambda<0 $, then the equilibrium point is stable, hence the solution is "pushing" the point in itself.
If the eigenvalue $ \lambda=0 $, then the equilibrium point is semi-stable, hence the solution goes to the same direction on both sides of the point.
· The axes corresponding to larger absolute value of eigenvalue will be closer to the phase portraits.
· We follow all the regulations to sketch local phase portraits. Sometimes it passes the cross-point of two axes, sometimes it does not.
Click here for the local phase portraits of the example nonlinear system.
6.4 Nullclines
6.5 Global Phase Portraits
6.6 References
Department of Computing + Mathematical Sciences, California Institute of Technology. (2002). Jacobian Linearizations, equilibrium points. Pasadena, CA., USA.
Institute of Natural and Mathematical Science, Massey University. (2017). 160.204 Differential Equations I: Course materials. Auckland, New Zealand.
Robinson, J. C. (2003). An introduction to ordinary differential equations. New York, NY., USA: Cambridge University Press.

{kind=link}