| (38 intermediate revisions by the same user not shown) | |||
| Line 27: | Line 27: | ||
<font size="3px"> An equilibrium point is a constant solution to a differential equation. Hence, for an ODE system, an equilibrium point is going to be a solution of a pair of constants. Set all of the differential terms equal to <math>0</math> to find the equilibrium point. | <font size="3px"> An equilibrium point is a constant solution to a differential equation. Hence, for an ODE system, an equilibrium point is going to be a solution of a pair of constants. Set all of the differential terms equal to <math>0</math> to find the equilibrium point. | ||
| − | In the example in 6.0, we set <math>\frac{dx}{dt}=\frac{dy}{dt}=0</math>, hence <math>x(1-2x-3y)=2y(3-x-2y)=0</math>. Solve this system of | + | In the example in 6.0, we set <math>\frac{dx}{dt}=\frac{dy}{dt}=0</math>, hence <math>x(1-2x-3y)=2y(3-x-2y)=0</math>. Solve this system of algebraic equations. |
'''·''' When <math>x=2y=0</math>, then <math>x=y=0</math>. | '''·''' When <math>x=2y=0</math>, then <math>x=y=0</math>. | ||
| Line 40: | Line 40: | ||
| − | '''<font size="4px"> 6.2 | + | '''<font size="4px"> 6.2 Linearisation </font>''' |
| − | <font size="3px"> | + | <font size="3px"> Macroscopically, the whole system is nonlinear, but we still need a linear system for further analysis. So here comes a method of linearisation near the equilibrium points. We linearise the graph of the solution for details to sketch a global phase portrait. A similar concept we can refer to is the expansion of Taylor series. It is not a linearisation, but using a method to approach the exact function, which is kinda like using local phase portraits to approach the global one. Linearisation here is a method to identify the local phase portraits. |
| + | Suppose <math>(x_0,y_0)</math> is an equilibrium point and define two deviation variables <math>\epsilon (t)=x(t)-x_0</math>, <math>\mu (t)=y(t)-y_0</math>, where <math>x(t)→x_0</math> and <math>y(t)→y_0</math>. The "deviation variables" mean that we start slightly differently from <math>(x_0,y_0)</math> and measure the difference to be more accurate. Hence <math>\epsilon(t)</math> and <math>\mu (t)</math> are approaching to <math>0</math>. | ||
| − | + | Then we differentiate the deviation variables to have | |
| − | < | + | <math>\frac{d\epsilon}{dt}=\frac{dx}{dt}=f(x_0+\epsilon,y_0+\mu)</math>, |
| + | <math>\frac{d\mu}{dt}=\frac{dy}{dt}=g(x_0+\epsilon,y_0+\mu)</math>. | ||
| − | + | By the expansion of Taylor series for two-variable functions, we have | |
| − | <font size="3px"> Institute of Natural and Mathematical Science, Massey University. (2017). ''160.204 Differential Equations I: Course materials.'' Auckland, New Zealand. | + | <math>\frac{d\epsilon}{dt}=f(x_0,y_0)+\epsilon \frac{\partial f}{\partial x}|_{(x_0,y_0)}+\mu \frac{\partial f}{\partial y}|_{(x_0,y_0)}+... </math>, |
| + | |||
| + | <math>\frac{d\mu}{dt}=g(x_0,y_0)+\epsilon \frac{\partial g}{\partial x}|_{(x_0,y_0)}+\mu \frac{\partial g}{\partial y}|_{(x_0,y_0)}+... </math> | ||
| + | |||
| + | |||
| + | Here we converted the nonlinear system to a linear one. As <math>f(x_0,y_0)≈g(x_0,y_0)→0</math>, so we can write the system into the matrix form, which is the linearisation near <math>(x_0,y_0)</math>: <math>\begin{bmatrix} | ||
| + | \frac{d\epsilon}{dt} \\ | ||
| + | \frac{d\mu}{dt} \end{bmatrix}=\begin{bmatrix} | ||
| + | \frac{\partial f}{\partial x} & \frac{\partial f}{\partial y} \\ | ||
| + | \frac{\partial g}{\partial x} & \frac{\partial g}{\partial y} \end{bmatrix} \begin{bmatrix} | ||
| + | \epsilon \\ | ||
| + | \mu \end{bmatrix} </math>. | ||
| + | |||
| + | This is called Jacobian matrix, usually denoted as <math>J</math>. | ||
| + | |||
| + | |||
| + | Still considering the example in 6.0, we will have the general linearisation | ||
| + | |||
| + | <math>J=Df(x,y)=\begin{bmatrix} | ||
| + | \frac{\partial f}{\partial x} & \frac{\partial f}{\partial y} \\ | ||
| + | \frac{\partial g}{\partial x} & \frac{\partial g}{\partial y} \end{bmatrix}=\begin{bmatrix} | ||
| + | 1-4x-3y & -3x \\ | ||
| + | -2y & 6-2x-8y \end{bmatrix} </math> for this nonlinear system. | ||
| + | |||
| + | Hence, if plugging all the equilibrium points from 6.1 into this general linearisation, we will have: | ||
| + | |||
| + | '''·''' <math>J_{(0,0)}=\begin{bmatrix} | ||
| + | 1 & 0 \\ | ||
| + | 0 & 6 \end{bmatrix}</math>. The eigenvalues are <math>\lambda_1=1</math>, <math>\lambda_2=6</math>, and the corresponding eigenvectors are <math>\bold{v_1}=\begin{bmatrix} | ||
| + | 1 \\ | ||
| + | 0 \end{bmatrix}</math>, <math>\bold{v_2}=\begin{bmatrix} | ||
| + | 0 \\ | ||
| + | 1 \end{bmatrix}</math>. | ||
| + | |||
| + | '''·''' <math>J_{(\frac{1}{2},0)}=\begin{bmatrix} | ||
| + | -1 & -\frac{3}{2} \\ | ||
| + | 0 & 5 \end{bmatrix}</math>. The eigenvalues are <math>\lambda_1=-1</math>, <math>\lambda_2=5</math>, and the corresponding eigenvectors are <math>\bold{v_1}=\begin{bmatrix} | ||
| + | 1 \\ | ||
| + | 0 \end{bmatrix}</math>, <math>\bold{v_2}=\begin{bmatrix} | ||
| + | 1 \\ | ||
| + | -4 \end{bmatrix}</math>. | ||
| + | |||
| + | '''·''' <math>J_{(0,\frac{3}{2})}=\begin{bmatrix} | ||
| + | -\frac{7}{2} & 0 \\ | ||
| + | -3 & -6 \end{bmatrix}</math>. The eigenvalues are <math>\lambda_1=-\frac{7}{2}</math>, <math>\lambda_2=-6</math>, and the corresponding eigenvectors are <math>\bold{v_1}=\begin{bmatrix} | ||
| + | 5 \\ | ||
| + | -6 \end{bmatrix}</math>, <math>\bold{v_2}=\begin{bmatrix} | ||
| + | 0 \\ | ||
| + | 1 \end{bmatrix}</math>. | ||
| + | |||
| + | '''·''' <math>J_{(-7,5)}=\begin{bmatrix} | ||
| + | 14 & 21 \\ | ||
| + | -10 & -20 \end{bmatrix}</math>. The eigenvalues are <math>\lambda_1=\sqrt{79}-3≈5.89</math>, <math>\lambda_2=-\sqrt{79}-3≈-11.89</math>, and the corresponding eigenvectors are <math>\bold{v_1}=\begin{bmatrix} | ||
| + | -0.81 \\ | ||
| + | 1 \end{bmatrix}</math>, <math>\bold{v_2}=\begin{bmatrix} | ||
| + | -1 \\ | ||
| + | 1.23 \end{bmatrix}</math>. | ||
| + | </font> | ||
| + | |||
| + | |||
| + | '''<font size="4px"> 6.3 Local Phase Portraits </font> ''' | ||
| + | |||
| + | <font size="3px"> For a nonlinear system of two ODEs, a local phase portrait consists two axes, the graph of solution and their directions. Basically, | ||
| + | |||
| + | |||
| + | '''·''' The axes follow the directions of eigenvectors of the linearisations. | ||
| + | |||
| + | '''·''' From the knowledge of equilibrium points and their stability, we know for real eigenvalues: | ||
| + | |||
| + | If the eigenvalue <math>\lambda>0</math>, then the equilibrium point is unstable, hence the solution is "pulling" the point out to both sides. | ||
| + | |||
| + | If the eigenvalue <math>\lambda<0</math>, then the equilibrium point is stable, hence the solution is "pushing" the point in itself. | ||
| + | |||
| + | If the eigenvalue <math>\lambda=0</math>, then the equilibrium point is semi-stable, hence the solution goes to the same direction on both sides of the point. | ||
| + | |||
| + | '''·''' From the knowledge of equilibrium points and their stability, we know for complex eigenvalues: | ||
| + | |||
| + | If the real part of eigenvalue <math>\rho>0</math>, then the equilibrium point is unstable, being "pulled" out to both sides alongside a spiral. | ||
| + | |||
| + | If the real part of eigenvalue <math>\rho<0</math>, then the equilibrium point is stable, being "pushed" in itself alongside a spiral. | ||
| + | |||
| + | If the real part of eigenvalue <math>\rho=0</math>, then the equilibrium point is semi-stable, being "surrounded" by a set of circles. | ||
| + | |||
| + | '''·''' The axes corresponding to larger absolute value of eigenvalue will be closer to the phase portraits. | ||
| + | |||
| + | '''·''' We follow all the regulations to sketch local phase portraits. Sometimes it passes the cross-point of two axes, sometimes it does not. | ||
| + | |||
| + | |||
| + | Click [https://www.projectrhea.org/rhea/images/1/1e/Local_Phase_Portrait.jpg here] for the local phase portraits of the example nonlinear system. | ||
| + | </font> | ||
| + | |||
| + | |||
| + | '''<font size="4px"> 6.4 Nullclines </font> ''' | ||
| + | |||
| + | <font size="3px"> Nullclines sometimes are called "zero-growth isoclines", which may make more sense. Derivatives geometrically stand for the rate of growth of a curve, and "isocline", as the name implies, means the line isolating other graphs away. Hence, nullclines are basically the lines where one of the differential terms in ODE equals to <math>0</math>. In a global phase portrait, nullclines are also like a bond, linking all the local phase portraits together. | ||
| + | |||
| + | In the example nonlinear system in 6.0, set <math>\frac{dx}{dt}=\frac{dy}{dt}=0</math>. Then <math>(x)(1-2x-3y)=(2y)(3-x-2y)=0</math>, where the polynomials in every bracket have a possibility to be <math>0</math>. Therefore, the nullclines are: <math>x=2</math>, <math>2y=0</math>, <math>1-2x-3y=0</math>, and <math>3-x-2y=0</math>. | ||
| + | |||
| + | Simplify them to have the nullclines: <math>x=0</math>, <math>y=0</math>, <math>y=-\frac{2}{3}x+\frac{1}{3}</math>, and <math>y=-\frac{1}{2}x+\frac{3}{2}</math>. | ||
| + | |||
| + | </font> | ||
| + | |||
| + | |||
| + | '''<font size="4px"> 6.5 Global Phase Portraits </font> ''' | ||
| + | |||
| + | <font size="3px"> A global phase portrait of a nonlinear ODE is a hybrid of all local phase portraits. Click [https://www.projectrhea.org/rhea/images/d/d7/Global_Phase_Portrait.jpg here] for the global sketch of the example nonlinear system. | ||
| + | </font> | ||
| + | |||
| + | |||
| + | '''<font size="4px"> 6.6 Exercise </font> ''' | ||
| + | |||
| + | <font size="3px">Consider the nonlinear system of ODE, | ||
| + | |||
| + | <math>\frac{dx}{dt}=3x(2-x-2y)</math>, | ||
| + | |||
| + | <math>\frac{dy}{dt}=y(1-2x-5y)</math>. | ||
| + | |||
| + | '''·''' Find the equilibrium points. | ||
| + | |||
| + | '''·''' Find the linearisations near these equilibrium points. | ||
| + | |||
| + | '''·''' Sketch the local phase portraits. | ||
| + | |||
| + | '''·''' Find the nullclines. | ||
| + | |||
| + | '''·''' Sketch the global phase portraits. </font> | ||
| + | |||
| + | |||
| + | '''<font size="4px"> 6.7 References </font> ''' | ||
| + | |||
| + | <font size="3px"> Department of Computing + Mathematical Sciences, California Institute of Technology. (2002). ''Jacobian Linearizations, equilibrium points.'' Pasadena, CA., USA. | ||
| + | |||
| + | Hanski, I. (1999) ''Metapopulation Ecology.'' Oxford, UK: Oxford University Press, pp. 43–46. | ||
| + | |||
| + | Institute of Natural and Mathematical Science, Massey University. (2017). ''160.204 Differential Equations I: Course materials.'' Auckland, New Zealand. | ||
Robinson, J. C. (2003). ''An introduction to ordinary differential equations.'' New York, NY., USA: Cambridge University Press. </font> | Robinson, J. C. (2003). ''An introduction to ordinary differential equations.'' New York, NY., USA: Cambridge University Press. </font> | ||
Latest revision as of 23:16, 21 November 2017
Non-Linear Systems of ODEs
6.0 Concept
Consider the system of ODEs in 4.0,
$ \frac{dx_1}{dt}=f_1(t,x_1,x_2,...x_n) $
$ \frac{dx_2}{dt}=f_2(t,x_1,x_2,...x_n) $
...
$ \frac{dx_n}{dt}=f_n(t,x_1,x_2,...x_n) $
When the $ n $ ODEs are not all linear, this is a nonlinear system of ODE. Consider an example,
$ \frac{dx}{dt}=x(1-2x-3y) $,
$ \frac{dy}{dt}=2y(3-x-2y) $.
In this tutorial, we will analyse this system in different aspects to build up a basic completed concept.
6.1 Equilibrium Point
An equilibrium point is a constant solution to a differential equation. Hence, for an ODE system, an equilibrium point is going to be a solution of a pair of constants. Set all of the differential terms equal to $ 0 $ to find the equilibrium point.
In the example in 6.0, we set $ \frac{dx}{dt}=\frac{dy}{dt}=0 $, hence $ x(1-2x-3y)=2y(3-x-2y)=0 $. Solve this system of algebraic equations.
· When $ x=2y=0 $, then $ x=y=0 $.
· When $ x=3-2x-2y=0 $, then $ x=0 $, $ y=\frac{3}{2} $.
· When $ 1-2x-3y=2y=0 $, then $ x=\frac{1}{2} $, $ y=0 $.
· When $ 1-2x-3y=3-x-2y=0 $, then $ x=-7 $, $ y=5 $.
Hence, the equilibrium points of this nonlinear system are $ (x=0,y=0) $, $ (x=0,y=\frac{3}{2}) $, $ (x=\frac{1}{2},y=0) $, and $ (x=-7,y=5) $. This means in a xy-coordinate, macroscopically, the graph of the solution of ODE (a function) will keep a dynamic equilibrium, near which the sum of velocity (measured in both direction and speed) of each point on the graph is $ 0 $.
6.2 Linearisation
Macroscopically, the whole system is nonlinear, but we still need a linear system for further analysis. So here comes a method of linearisation near the equilibrium points. We linearise the graph of the solution for details to sketch a global phase portrait. A similar concept we can refer to is the expansion of Taylor series. It is not a linearisation, but using a method to approach the exact function, which is kinda like using local phase portraits to approach the global one. Linearisation here is a method to identify the local phase portraits.
Suppose $ (x_0,y_0) $ is an equilibrium point and define two deviation variables $ \epsilon (t)=x(t)-x_0 $, $ \mu (t)=y(t)-y_0 $, where $ x(t)→x_0 $ and $ y(t)→y_0 $. The "deviation variables" mean that we start slightly differently from $ (x_0,y_0) $ and measure the difference to be more accurate. Hence $ \epsilon(t) $ and $ \mu (t) $ are approaching to $ 0 $.
Then we differentiate the deviation variables to have
$ \frac{d\epsilon}{dt}=\frac{dx}{dt}=f(x_0+\epsilon,y_0+\mu) $,
$ \frac{d\mu}{dt}=\frac{dy}{dt}=g(x_0+\epsilon,y_0+\mu) $.
By the expansion of Taylor series for two-variable functions, we have
$ \frac{d\epsilon}{dt}=f(x_0,y_0)+\epsilon \frac{\partial f}{\partial x}|_{(x_0,y_0)}+\mu \frac{\partial f}{\partial y}|_{(x_0,y_0)}+... $,
$ \frac{d\mu}{dt}=g(x_0,y_0)+\epsilon \frac{\partial g}{\partial x}|_{(x_0,y_0)}+\mu \frac{\partial g}{\partial y}|_{(x_0,y_0)}+... $
Here we converted the nonlinear system to a linear one. As $ f(x_0,y_0)≈g(x_0,y_0)→0 $, so we can write the system into the matrix form, which is the linearisation near $ (x_0,y_0) $: $ \begin{bmatrix} \frac{d\epsilon}{dt} \\ \frac{d\mu}{dt} \end{bmatrix}=\begin{bmatrix} \frac{\partial f}{\partial x} & \frac{\partial f}{\partial y} \\ \frac{\partial g}{\partial x} & \frac{\partial g}{\partial y} \end{bmatrix} \begin{bmatrix} \epsilon \\ \mu \end{bmatrix} $.
This is called Jacobian matrix, usually denoted as $ J $.
Still considering the example in 6.0, we will have the general linearisation
$ J=Df(x,y)=\begin{bmatrix} \frac{\partial f}{\partial x} & \frac{\partial f}{\partial y} \\ \frac{\partial g}{\partial x} & \frac{\partial g}{\partial y} \end{bmatrix}=\begin{bmatrix} 1-4x-3y & -3x \\ -2y & 6-2x-8y \end{bmatrix} $ for this nonlinear system.
Hence, if plugging all the equilibrium points from 6.1 into this general linearisation, we will have:
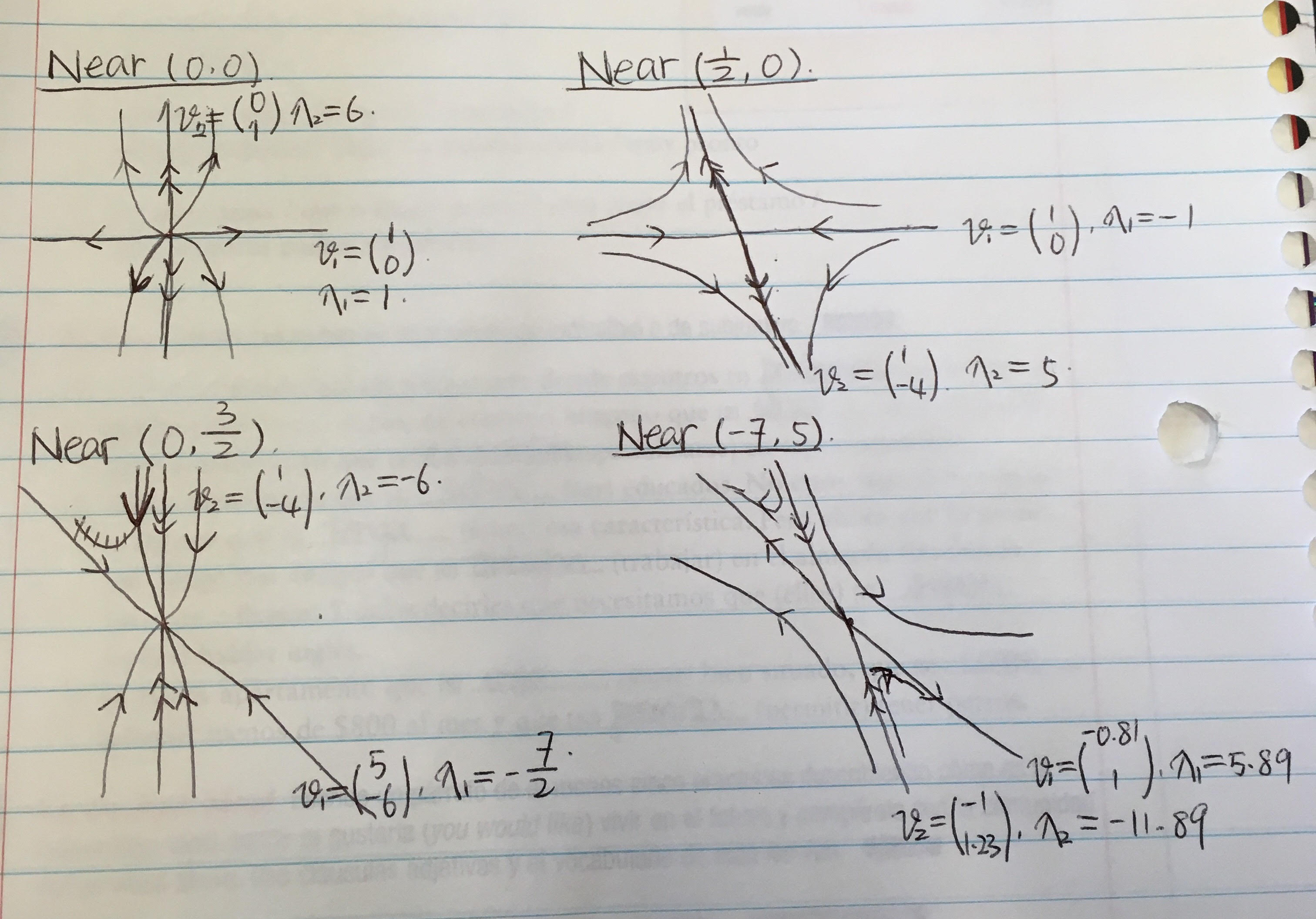
· $ J_{(0,0)}=\begin{bmatrix} 1 & 0 \\ 0 & 6 \end{bmatrix} $. The eigenvalues are $ \lambda_1=1 $, $ \lambda_2=6 $, and the corresponding eigenvectors are $ \bold{v_1}=\begin{bmatrix} 1 \\ 0 \end{bmatrix} $, $ \bold{v_2}=\begin{bmatrix} 0 \\ 1 \end{bmatrix} $.
· $ J_{(\frac{1}{2},0)}=\begin{bmatrix} -1 & -\frac{3}{2} \\ 0 & 5 \end{bmatrix} $. The eigenvalues are $ \lambda_1=-1 $, $ \lambda_2=5 $, and the corresponding eigenvectors are $ \bold{v_1}=\begin{bmatrix} 1 \\ 0 \end{bmatrix} $, $ \bold{v_2}=\begin{bmatrix} 1 \\ -4 \end{bmatrix} $.
· $ J_{(0,\frac{3}{2})}=\begin{bmatrix} -\frac{7}{2} & 0 \\ -3 & -6 \end{bmatrix} $. The eigenvalues are $ \lambda_1=-\frac{7}{2} $, $ \lambda_2=-6 $, and the corresponding eigenvectors are $ \bold{v_1}=\begin{bmatrix} 5 \\ -6 \end{bmatrix} $, $ \bold{v_2}=\begin{bmatrix} 0 \\ 1 \end{bmatrix} $.
· $ J_{(-7,5)}=\begin{bmatrix} 14 & 21 \\ -10 & -20 \end{bmatrix} $. The eigenvalues are $ \lambda_1=\sqrt{79}-3≈5.89 $, $ \lambda_2=-\sqrt{79}-3≈-11.89 $, and the corresponding eigenvectors are $ \bold{v_1}=\begin{bmatrix} -0.81 \\ 1 \end{bmatrix} $, $ \bold{v_2}=\begin{bmatrix} -1 \\ 1.23 \end{bmatrix} $.
6.3 Local Phase Portraits
For a nonlinear system of two ODEs, a local phase portrait consists two axes, the graph of solution and their directions. Basically,
· The axes follow the directions of eigenvectors of the linearisations.
· From the knowledge of equilibrium points and their stability, we know for real eigenvalues:
If the eigenvalue $ \lambda>0 $, then the equilibrium point is unstable, hence the solution is "pulling" the point out to both sides.
If the eigenvalue $ \lambda<0 $, then the equilibrium point is stable, hence the solution is "pushing" the point in itself.
If the eigenvalue $ \lambda=0 $, then the equilibrium point is semi-stable, hence the solution goes to the same direction on both sides of the point.
· From the knowledge of equilibrium points and their stability, we know for complex eigenvalues:
If the real part of eigenvalue $ \rho>0 $, then the equilibrium point is unstable, being "pulled" out to both sides alongside a spiral.
If the real part of eigenvalue $ \rho<0 $, then the equilibrium point is stable, being "pushed" in itself alongside a spiral.
If the real part of eigenvalue $ \rho=0 $, then the equilibrium point is semi-stable, being "surrounded" by a set of circles.
· The axes corresponding to larger absolute value of eigenvalue will be closer to the phase portraits.
· We follow all the regulations to sketch local phase portraits. Sometimes it passes the cross-point of two axes, sometimes it does not.
Click here for the local phase portraits of the example nonlinear system.
6.4 Nullclines
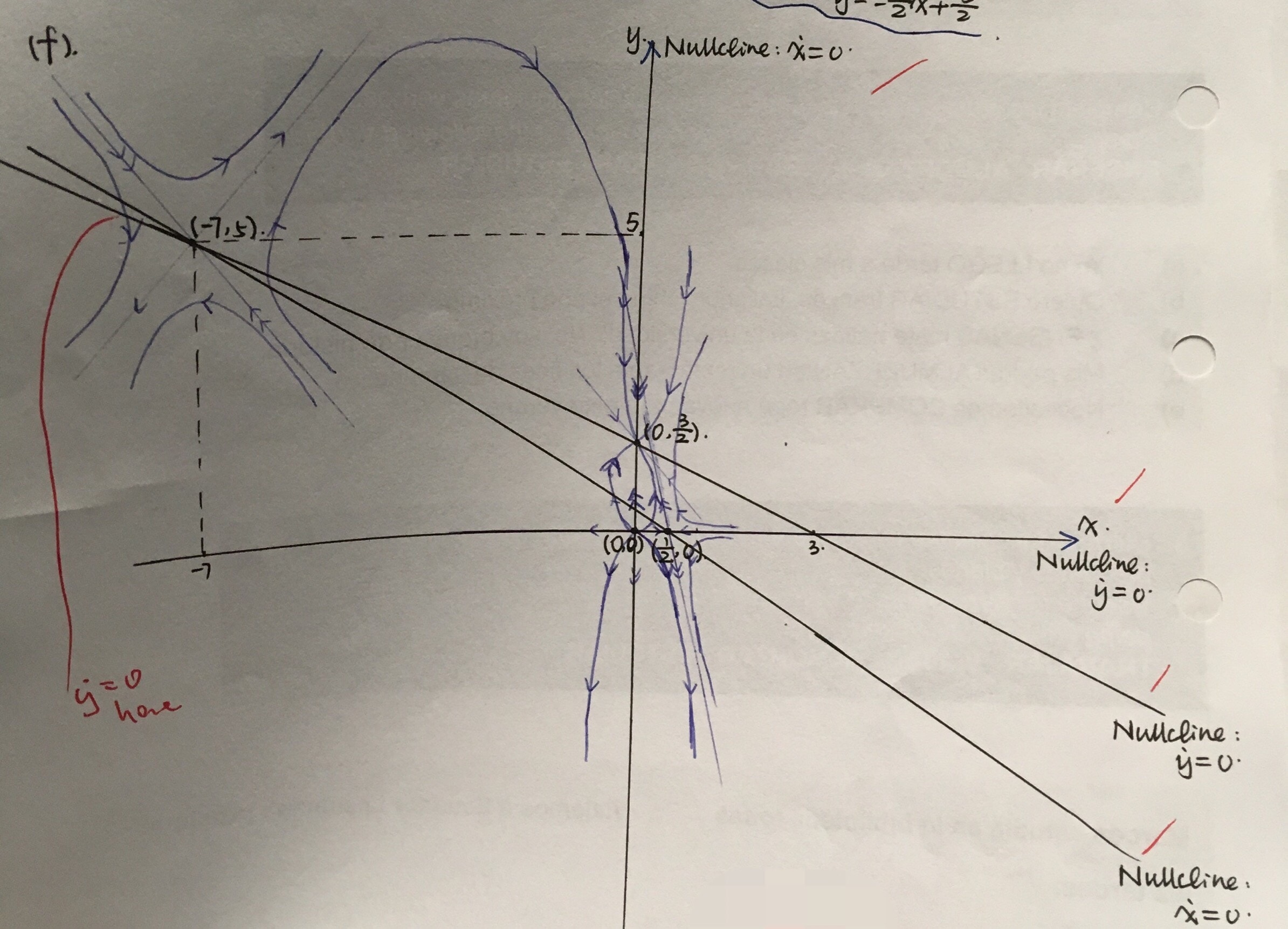
Nullclines sometimes are called "zero-growth isoclines", which may make more sense. Derivatives geometrically stand for the rate of growth of a curve, and "isocline", as the name implies, means the line isolating other graphs away. Hence, nullclines are basically the lines where one of the differential terms in ODE equals to $ 0 $. In a global phase portrait, nullclines are also like a bond, linking all the local phase portraits together.
In the example nonlinear system in 6.0, set $ \frac{dx}{dt}=\frac{dy}{dt}=0 $. Then $ (x)(1-2x-3y)=(2y)(3-x-2y)=0 $, where the polynomials in every bracket have a possibility to be $ 0 $. Therefore, the nullclines are: $ x=2 $, $ 2y=0 $, $ 1-2x-3y=0 $, and $ 3-x-2y=0 $.
Simplify them to have the nullclines: $ x=0 $, $ y=0 $, $ y=-\frac{2}{3}x+\frac{1}{3} $, and $ y=-\frac{1}{2}x+\frac{3}{2} $.
6.5 Global Phase Portraits
A global phase portrait of a nonlinear ODE is a hybrid of all local phase portraits. Click here for the global sketch of the example nonlinear system.
6.6 Exercise
Consider the nonlinear system of ODE,
$ \frac{dx}{dt}=3x(2-x-2y) $,
$ \frac{dy}{dt}=y(1-2x-5y) $.
· Find the equilibrium points.
· Find the linearisations near these equilibrium points.
· Sketch the local phase portraits.
· Find the nullclines.
· Sketch the global phase portraits.
6.7 References
Department of Computing + Mathematical Sciences, California Institute of Technology. (2002). Jacobian Linearizations, equilibrium points. Pasadena, CA., USA.
Hanski, I. (1999) Metapopulation Ecology. Oxford, UK: Oxford University Press, pp. 43–46.
Institute of Natural and Mathematical Science, Massey University. (2017). 160.204 Differential Equations I: Course materials. Auckland, New Zealand.
Robinson, J. C. (2003). An introduction to ordinary differential equations. New York, NY., USA: Cambridge University Press.

{kind=link}
{kind=link}